Digital biquad filter
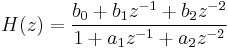
In signal processing, a digital biquad filter is a second-order recursive linear filter, containing two poles and two zeros. "Biquad" is an abbreviation of "biquadratic", which refers to the fact that in the Z domain, its transfer function is the ratio of two quadratic functions:
High-order recursive filters can be highly sensitive to quantization of their coefficients, and can easily become unstable. This is much less of a problem with first and second-order filters; therefore, higher-order filters are typically implemented as serially-cascaded biquad sections (and a first-order filter if necessary).
Contents |
Implementation
Direct Form 1
The most straightforward implementation is the Direct Form 1, which has the following difference equation:

Here the  ,
,  and
and  coefficients determine zeros, and
coefficients determine zeros, and  ,
,  determine the position of the poles.
determine the position of the poles.
Flow graph of biquad filter in Direct Form 1:
Direct Form 2
The Direct Form 1 implementation requires four delay registers. An equivalent circuit is the Direct Form 2 implementation, which requires only two delay registers:
The Direct Form 2 implementation is called the canonical form, because it uses the minimal amount of delays, adders and multipliers, yielding in the same transfer function as the Direct Form 1 implementation. The difference equations for DF2 are:

where

References
- Sen M Kuo, Bob H Lee: Real-Time Digital Signal Processing, Wiley & Sons Ltd, 2001
- Cookbook formulae for audio EQ biquad filter coefficients
- Biquad filter
- JOS BiQuad section